What's New in WorkBench?
WorkBench 2.0 contains changes to project structure, navigation tree, and improved views.
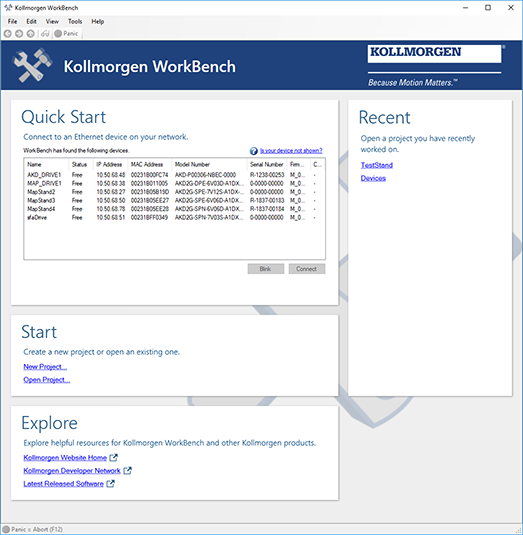
Quick Start
When WorkBench starts, a Quick Start page is shown with quick links to connect to a device, open a project, or explore resources. For more information see WorkBench Start Page.
Project Management
WorkBench 2.0 lets you save your machine structure (all your connected devices) and all their data, in one single project file. This project file can be exchanged between people or WorkBench instances. It will store the following:
- Machine structure (devices and groups if you added any)
- Parameters for each of the device
- Different settings (performance servo tuner, scope, macro, …)
For more information on working with projects see WorkBench Projects.
Device Management, Version Support, and Sync
Previous device generation (AKD) and the new generation (AKD2G) can both be connected within the same project.
In the previous WorkBench versions, offline and online devices were created as separate elements, and the parameters were passed between them using parameter files. In WorkBench 2.0, a device appearing as a node in the tree navigation can be connected to a physical device (online) or used to launch an Offline Emulation of a device:
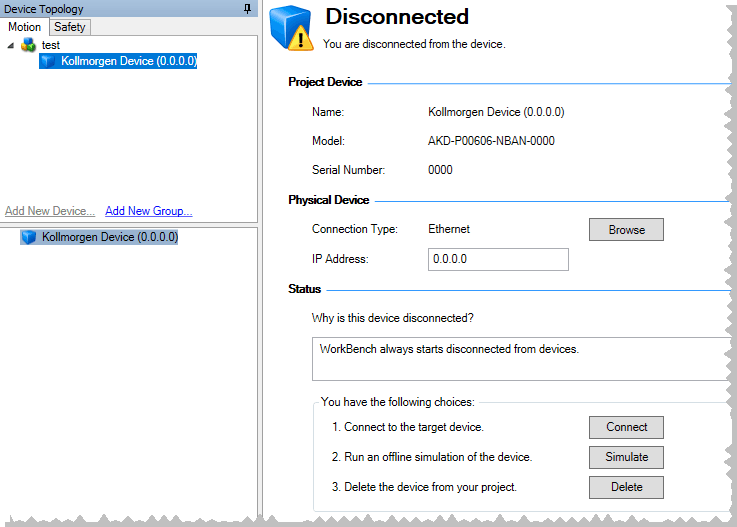
Simulated devices can be configured and then later connected to a physical device. Physical devices can also be simulated at any time if connection to them is no longer available.
A device node can be configured to connect to a new physical device (IP address change, device replacement, new machine reusing an existing project) using the Browse functionality. WorkBench 2.0 will check the compatibility of the device models and generate warnings if there is a compatibility error.
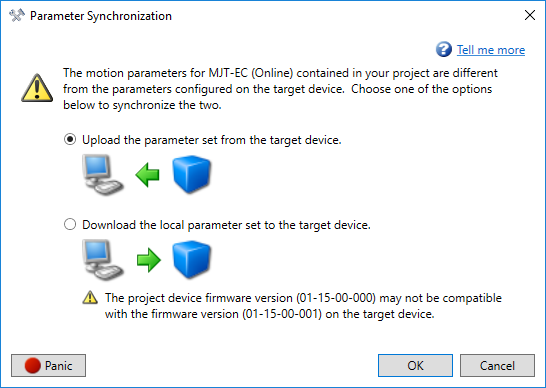
WorkBench will save a copy of the device parameters within the project each time you save the device parameters. It is possible that your physical device may become out of sync with your project parameters if you edited them offline using simulation mode, or if somebody else connected to the device in the meantime and changed some parameters. WorkBench 2.0 provides a simple synchronization mechanism when differences are detected:
The simulation will always be launched with the local parameters contained in the project file.
For more information see:
- Adding an Online Ethernet
 Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) Device
Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) Device - Adding an Online TwinCAT Device
- Adding an Offline Device
- About Parameter Synchronization
Navigation Tree
WorkBench 2.0 has a dual-navigation tree. The dual-navigation tree keeps the respective navigation trees small, avoiding scroll operations and allows quicker switching between devices and settings.
| Primary Tree (top) | Secondary tree (bottom) |
|---|---|
|
|
|
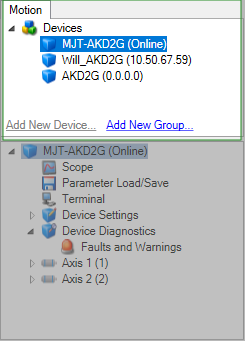 The primary tree displays all devices and their connected status or IP address. You may add groups (see Add new Group...) under the project if required to keep a structured machine overview.
The primary tree displays all devices and their connected status or IP address. You may add groups (see Add new Group...) under the project if required to keep a structured machine overview.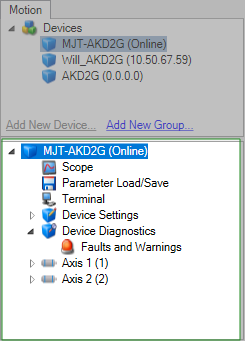 Displays the configuration of the option selected in the primary tree. There are sections for device-wide settings (e.g. feedback and power), axis-specific settings (e.g.brake and tuning), and diagnostics.
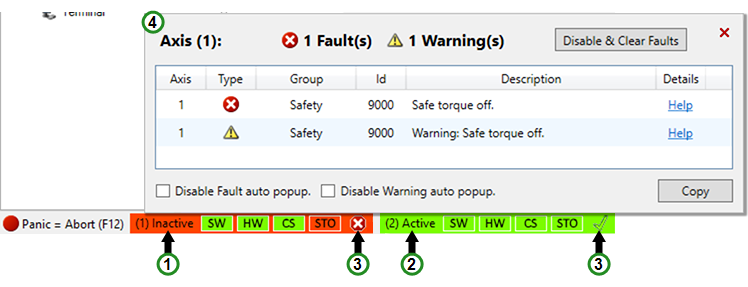
Displays the configuration of the option selected in the primary tree. There are sections for device-wide settings (e.g. feedback and power), axis-specific settings (e.g.brake and tuning), and diagnostics.Status Bar
WorkBench 2.0 displays a multi-axis status bar with faults and warnings indicators.
|
|
New AKD2G Views
The AKD2G has a number of unique new views in WorkBench. Following is a high-level overview.
Hardware Configuration View
This view configures the usage of all or a part of a connector. The same connector (or part of it) could be used as a feedback source or as general I/O.
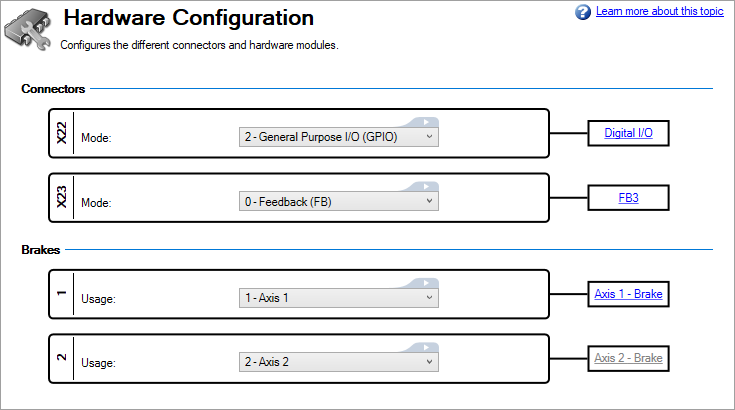
See Hardware Configuration for more information.
Feedback Views
The AKD2G provides more Feedback Devices possibilities than AKD. The new view allows the user to get a quick overview of all the feedbacks.
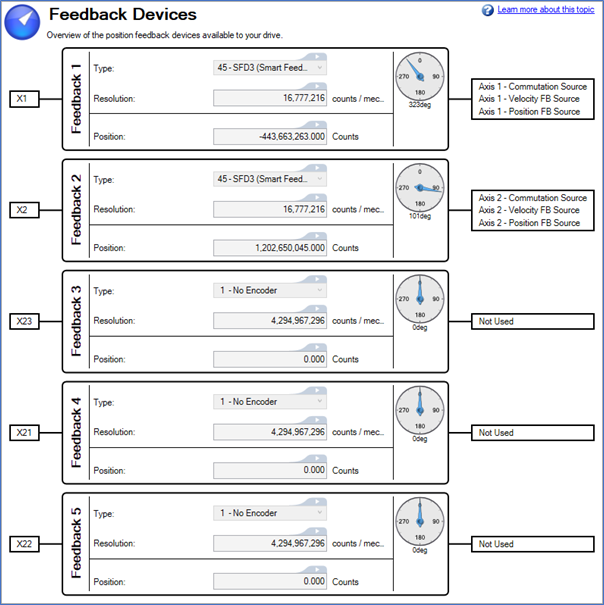
Each feedback can be selected to view more details and configuration options:
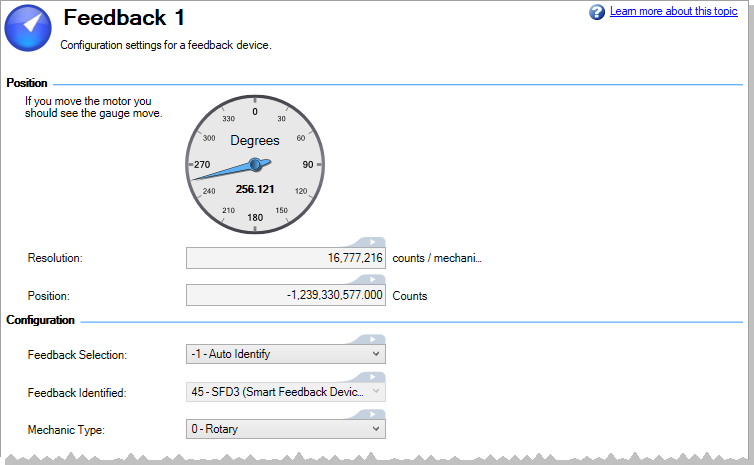
See Feedback View and Feedback Devices for more information.
Actions View
The Actions table can configure different tasks triggered by a source, and a condition applied to the source value. It replaces the digital input modes available in AKD, being much more flexible and scalable as new tasks and sources are added in the future.
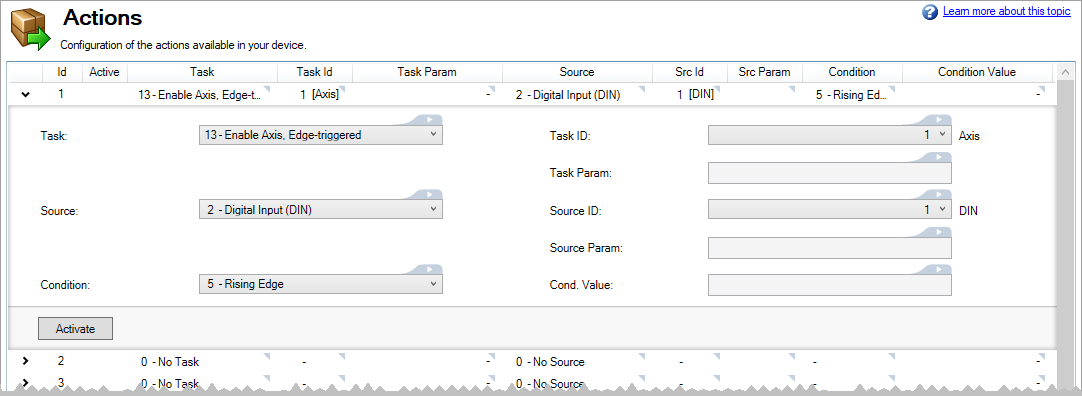
See Action Table for more information.
Motion Tasks View
The AKD2G has the possibility to have 32 different Motion Tasks per axis. An entirely new user interface allows in-place editing of each motion task using expanding rows.
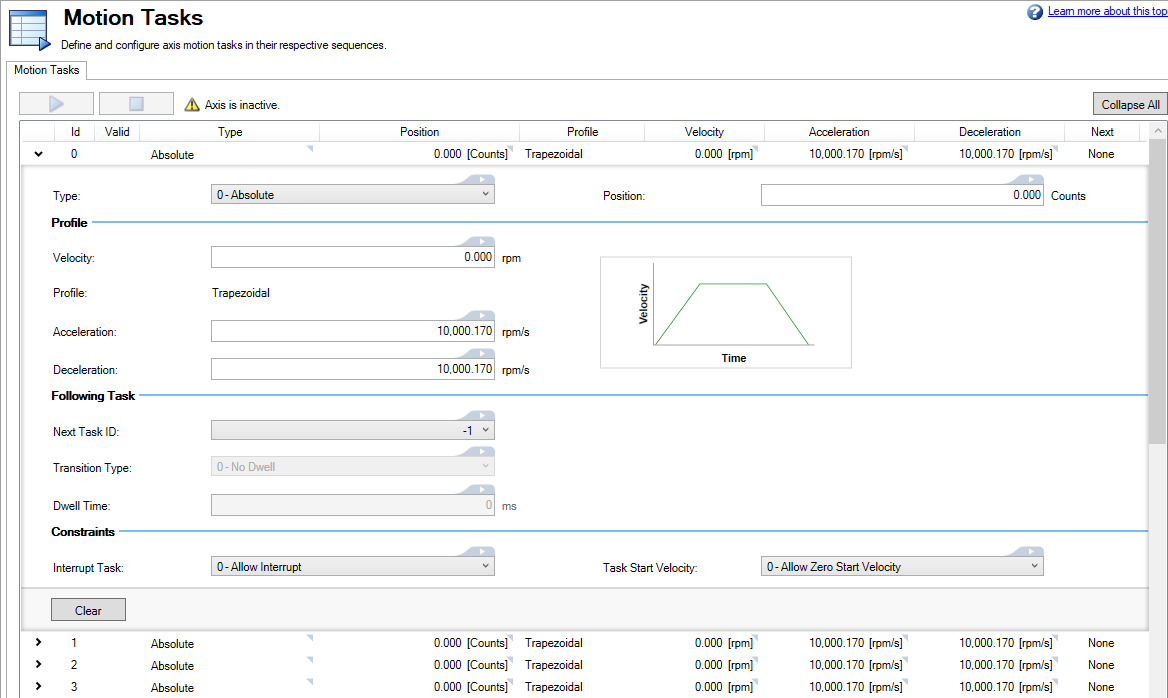
See Motion Tasks for more information.
Distributed Drives (AKD-C/N)
With device selection now in the primary tree (top) of the dual-tree navigation, the sub devices are displayed in the tree underneath the power supply structure. To automatically create and update the topology structure, we have put in place a new distributed network discovery scan:
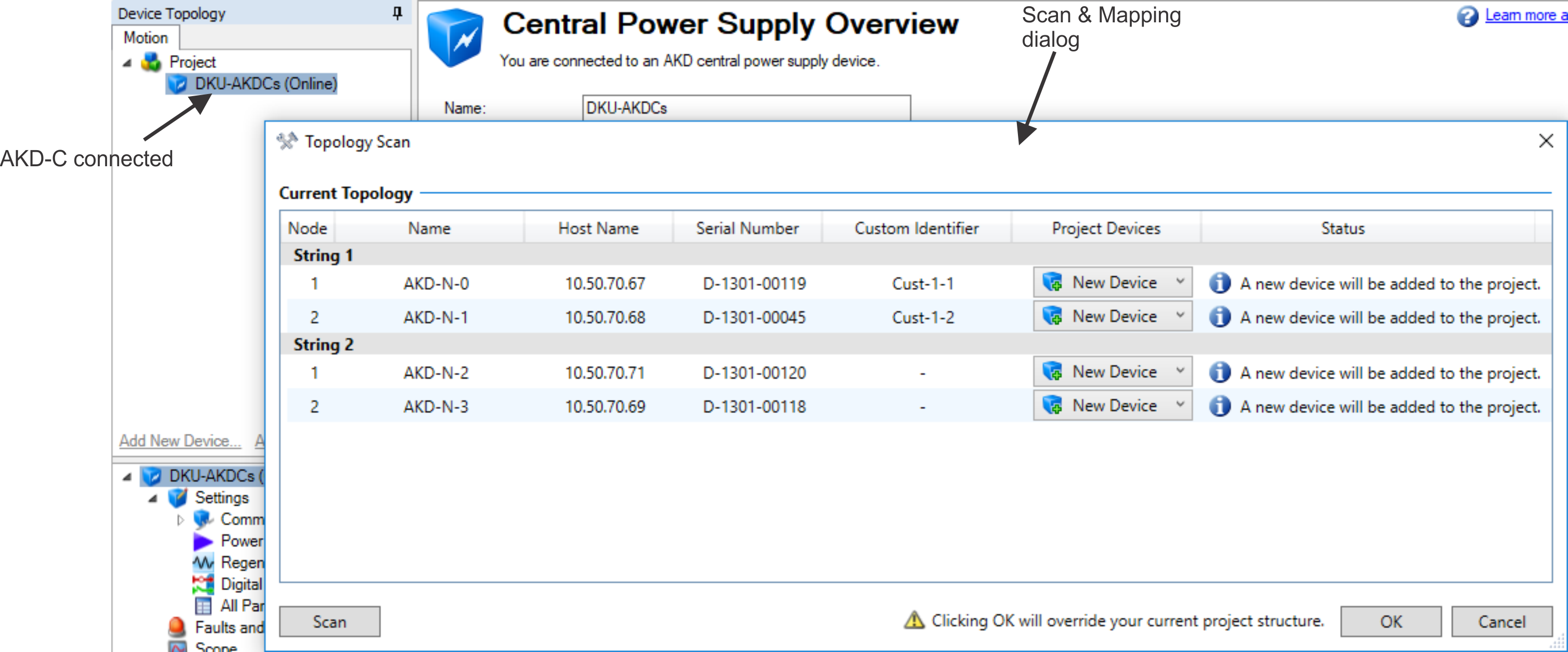
Once mapping is done and validated, WorkBench will create or update the structure of the distributed topology:
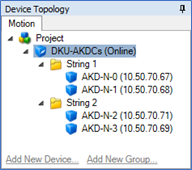
Each time you connect to an AKD-C, a scan will automatically be launched to ensure that the topology structure is synchronized. Disconnecting from the AKD-C will prevent connection to its sub-devices.






